Solucionando as Equações de Maxwell
Objetivo
Aqui, fornecemos uma visão geral sobre como resolver as equações de Maxwell na prática. As abordagens usadas para resolver problemas específicos são abordadas posteriormente
A prática de resolver as equações de Maxwell para um problema aplicado pode ser dividida em três partes:
Definindo o problema: aqui, as equações de Maxwell são modificadas, reformuladas ou aproximadas para se adequar a um problema físico particular.
Definindo o limite e as condições iniciais: são invocados para que as soluções das equações de Maxwell sejam resolvidas exclusivamente para uma aplicação particular.
Resolução com abordagens analíticas ou numéricas: uma vez que o problema, as condições de contorno e as condições iniciais tenham sido definidas, a solução final é obtida através de abordagens analíticas ou numéricas.
Definindo o Problema
Em “Visão Geral das Equações de Maxwell”, apresentamos formulações gerais para as equações de Maxwell. Na maioria dos casos, entretanto, as equações de Maxwell podem ser modificadas, reformuladas ou aproximadas para simplificar um problema aplicado. A falha em escolher uma formulação apropriada pode resultar na dificuldade ou impossibilidade de resolver o problema usando os meios atuais.
Examplos:
DC Resistivity:
onde \(\mathbf{J_s}\) é uma fonte de corrente elétrica e \(\phi\) é um potencial escalar.
Frequency Domain Electromagnetics:
onde \(\mathbf{J_s}\) é uma fonte de corrente elétrica. Para alguns problemas, podemos ser capazes de trabalhar nos regimes quase estáticos (\(\sigma \gg \omega \varepsilon\)) ou onda (\(\sigma \ll \omega \varepsilon\)); permitindo-nos negligenciar os termos envolvendo \(\varepsilon\). Em muitos ambientes geológicos, o impacto das propriedades magnéticas da Terra é insignificante (ou seja \(\mu \approx \mu_0\)). Neste caso, podemos tirar \(\mu\) do sistema curl-curl. No caso de uma fonte magnética, precisaríamos resolver um sistema diferente.
Métodos Eletromagnéticos no Domínio do Tempo:
onde \(\mathbf{j_s}\) é uma fonte de corrente elétrica. Esta equação é o equivalente dependente do tempo àquela usada em métodos eletromagnéticos no domínio da frequência. Para alguns problemas, podemos ser capazes de trabalhar nos regimes quase estáticos ou de onda; permitindo-nos negligenciar os termos envolvendo \(\varepsilon\). Se o impacto das propriedades magnéticas da Terra for insignificante (ou seja \(\mu \approx \mu_0\)), podemos tirar \(\mu\) do sistema curl-curl. No caso de uma fonte magnética, precisaríamos resolver um sistema diferente.
Condições Iniciais e de Contornos
Condições de Fronteiras
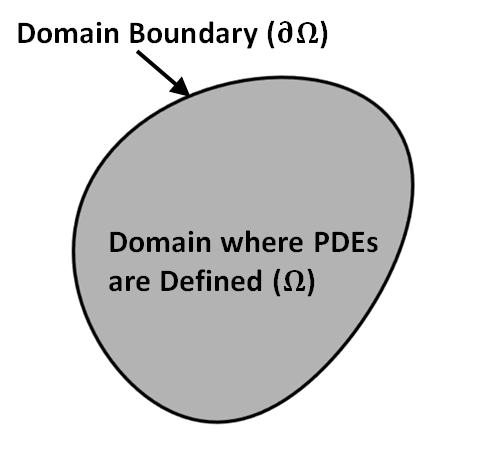
Figura 73 Ilustração de um domínio e contorno.
As condições de contornos garantem que o problema seja bem posto; ou seja, tem uma solução única. Isso é necessário ao usar as equações de Maxwell para resolver problemas aplicados em geociências eletromagnéticas. Equações diferenciais correspondentes a um problema físico são definidas dentro de uma região, ou “domínio” (denotado por \(\Omega\)). Para colocar o problema bem colocado, as condições de contorno são aplicadas às arestas deste domínio (denotadas por \(\partial \Omega\)). Existem três tipos de condições de limite, que estão listados abaixo:
Condições de Contornos de Dirichlet: As condições de contorno de Dirichlet são de longe as mais diretas e fáceis de implementar. As condições de Dirichlet definem diretamente o valor da solução no limite, ou seja:
onde \(\mathbf{F}\) é algum vetor campo/fluxo definido dentro do domínio, \(\mathbf{g}\) é uma função espacialmente dependente e \(\mathbf{r} = (x,y,z)\). Em muitos casos, a condição de Dirichlet é fornecida como um valor constante; como, todos os campos vão para zero no limite.
Condições de Contornos de Neumann: As condições de contorno de Neumann são impostas especificando as derivadas espaciais da solução no contorno. Comumente, as condições de Neumann definem as derivadas direcionais normais à superfície do domínio, ou seja:
onde \(\mathbf{n}\) é a direção do vetor unitário perpendicular a fronteira do domínio \(\partial \Omega\), \(F_n = \mathbf{F \cdot \hat n}\;\) é a componente de um campo vetorial/fluxo \(\mathbf{F}\) ao longo \(\mathbf{n}\), \(\mathbf{g}\) é uma função espacialmente dependente e \(\mathbf{r} = (x,y,z)\). Fisicamente, as condições de Neumann são usadas para definir a taxa de fluxo através da fronteira. Isso é frequentemente aplicado a problemas que se comportam de acordo com a equação de calor.
Condições de Contorno de Robin (Mista): As condições de contorno de Robin são uma combinação linear das condições de Dirichlet e Neumann, ou seja:
onde \(a\) e \(b\) são constantes, \(\mathbf{n}\) é a direção do vetor unitário perpendicular a fronteira do domínio \(\partial \Omega\), \(F_n = \mathbf{F \cdot \hat n}\;\) é a componente de um campo/fluxo vetorial \(\mathbf{F}\) junto com \(\mathbf{n}\), \(\mathbf{g}\) é uma função espacialmente dependente e \(\mathbf{r} = (x, y, z)\). As condições de Robin são usadas quando a taxa de fluxo que sai do domínio depende do valor do campo na fronteira.
Condições Iniciais
As condições iniciais, além das condições de contorno, são necessárias para resolver problemas dependentes do tempo. Como as soluções para problemas nas ciências físicas são causais, os campos e fluxos em um determinado momento dependem dos campos e fluxos em momentos anteriores. Geralmente, definimos as condições iniciais para definir a solução em \(t=0\) e estamos interessados no comportamento dos campos e fluxos em \(t \geq 0\). Se a equação diferencial sendo resolvida tem apenas derivadas de primeira ordem no tempo, as condições iniciais podem ser dadas por:
onde \(\mathbf{F}\) é o vetor campo/fluxo e \(\mathbf{F_0}\) é o vetor campo/fluxo em \(t=0\). Este tipo de condição seria necessário para resolver a equação eletromagnética no domínio do tempo apresentada em “Definindo o Problema “.
Variáveis múltiplas e derivadas no tempo de ordem superior
Se a equação diferencial contém múltiplas variáveis e derivadas no tempo de ordem superior, não podemos resolver o problema simplesmente definindo as condições iniciais nos campos/fluxos em \(t = 0\). Onde \(k\) é a derivada no tempo de ordem mais alta encontrada no problema e \(n\) é o número de variáveis dependentes do tempo, exigiríamos \(nk\) condições iniciais totais para resolver o problema. Essas condições iniciais assumiriam a forma:
onde \(\mathbf{F}\) é o campo vetorial/fluxo associado à variável \(n\), e \(\mathbf{g^k}\) é uma função dependente do tempo definida em todo o domínio para a derivada \(k^{j}\). Um exemplo disso é a equação de onda dependente do tempo apresentada em “Definindo o Problema”, que requer condições iniciais em \(\mathbf{e}\) e sua derivada de tempo de primeira ordem \(\partial \mathbf{e}/ \partial t\).
Soluções Numéricas e Analíticas
Tendo formulado as equações de Maxwell apropriadamente, bem como implementado as condições de contorno e as condições iniciais, podemos agora resolver o problema. Existem duas maneiras de obter soluções significativas: analiticamente e numericamente.
Soluções Analíticas
Idealmente, alguém derivaria uma solução analítica. O problema se torna ainda mais tratável se a solução for uma expressão de forma fechada; pode ser avaliada usando um número finito de operações simples. Geralmente, as soluções analíticas só são possíveis se o problema for simplificado ou exibir um grau suficiente de simetria geométrica. Preferimos soluções analíticas porque são rápidas de calcular e mostram explicitamente como a solução depende de suas variáveis de entrada.
Algumas soluções podem ser chamadas de semi-analíticas. Soluções semi-analíticas geralmente requerem a avaliação numérica de uma ou mais funções integrais, séries infinitas e/ou limites. Nesse caso, a solução não é uma expressão de forma fechada. No entanto, as soluções semi-analíticas podem ser muito úteis na prática.
Soluções Numéricas
Soluções numéricas são usadas para aproximar os campos e fluxos a um nível desejado de precisão. As abordagens numéricas são capazes de resolver problemas sem depender de simetrias geométricas. O processo de obtenção de uma solução numérica pode ser dividido em três partes:
Discretizando o Domínio
Definindo Campos e Fluxos
Aplicação de algoritmos de computador
Uma compreensão conceitual das etapas acima mencionadas será fornecida aqui. No entanto, não apresentaremos todos os antecedentes necessários para resolver esses problemas na prática; como é extenso.
Discretização do Domínio:
Para obter uma solução numérica, o domínio é primeiro discretizado; ou seja, subdividido em uma coleção de pequenos volumes/regiões. A coleção desses volumes é chamada de ‘malha’. As propriedades físicas dentro de cada volume são consideradas constantes. O tamanho e a forma de cada volume dependem da geometria do problema, do tamanho do domínio e da quantidade de memória disponível no computador. Em Figura 74 a, vemos uma discretização 1D. A discretização 1D funciona bem quando, localmente, a Terra exibe uma estrutura em camadas. Para problemas com geometrias irregulares, podemos escolher usar uma discretização 2D ou 3D (Figura 74 b). Via de regra, quanto mais fina a discretização (conforme as dimensões das células diminuem), melhor nossa solução numérica se aproximará da verdadeira solução do nosso problema.
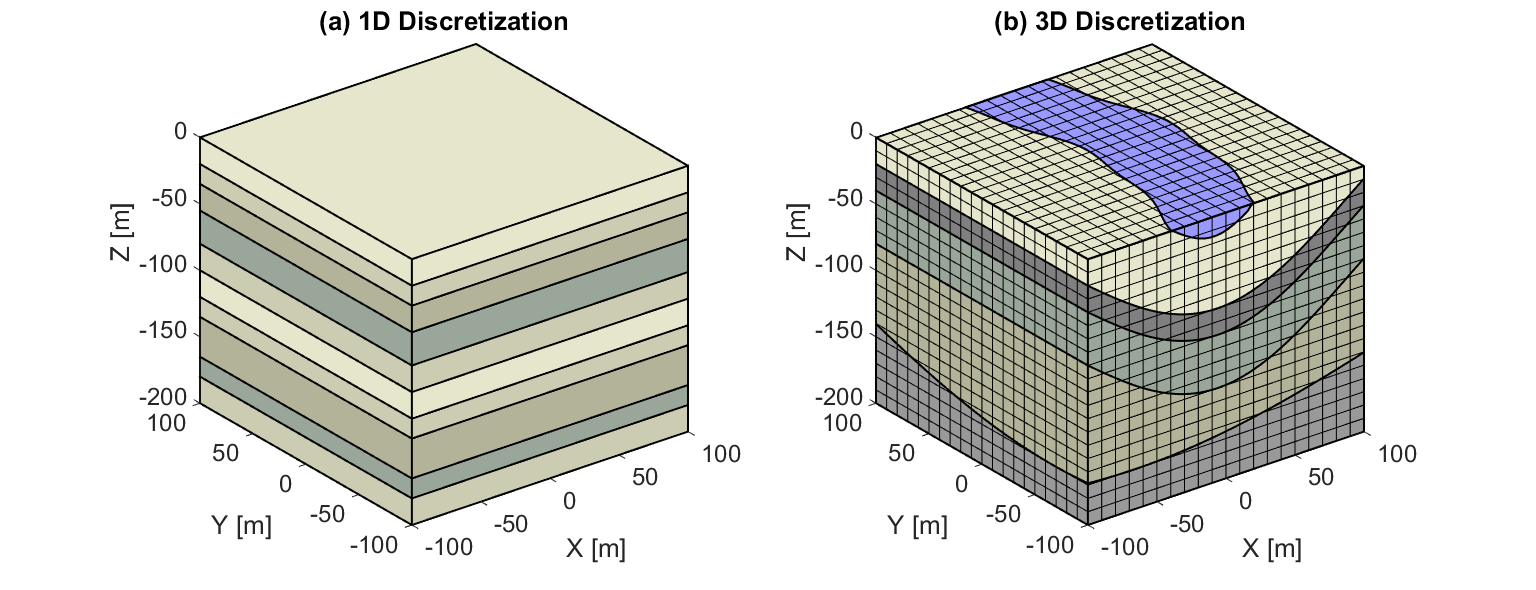
Figura 74 Discretizaçõa da estrutura da Terra. (a) Discretização 1D. (b) Discretização 3D.
Definindo Campos, Fluxos e Potenciais
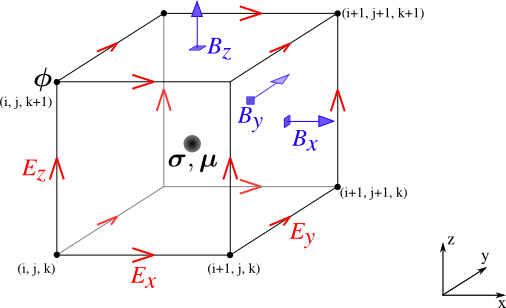
Figura 75 Definição de campos (\(\mathbf{E}\)), fluxos (\(\mathbf{B}\)) e potenciais \(\phi\) sobre uma célula cúbica.
Os campos, fluxos e/ou potenciais pertencentes a um problema particular são definidos em todo o domínio. Uma vez que o domínio foi discretizado, entretanto, a avaliação dessas quantidades só é possível em um número finito de locais. Os campos, fluxos e/ou potenciais sendo calculados dependem da formulação das equações de Maxwell. As localizações dessas quantidades para cada célula dependem do problema e das condições de interface correspondentes.
Como exemplo, considere Figura 75 onde:
o potencial \(\phi\) é definido nos nós da célula.
componentes cartesianas do campo elétrico \(\mathbf{E}\) são definidas nas bordas da célula.
componentes cartesianas da densidade do fluxo magnético \(\mathbf{B}\) são definidas nas faces das células.
propriedades físicas \(\sigma\) e \(\mu\) são definidas nos centros das células.
Em problemas envolvendo \(\mathbf{E}\) e \(\mathbf{B}\), temos como técnica de abordagem ideal porque respeita naturalmente as condições de interface para campos eletromagnéticos. Lembre-se de “Condições de Interfaces” que as componentes tangenciais do campo elétrico e as componentes normais do fluxo magnético são contínuas, assim como, elas são contínuas através das interfaces.
**Aplicação de Algoritmos Computacionais: **
Como etapa final, o problema numérico é comumente escrito como um sistema linear e resolvido usando algoritmos de computador. O sistema pode ser formado usando métodos de diferenças finitas, volumes finitos ou elementos finitos. Geralmente assumindo a forma:
onde \(\mathbf{u}\) contém os campos e/ou fluxos em locais discretos em todo o domínio, \(\mathbf{q_s}\) é um vetor correspondente ao termo de origem e \(\mathbf{A(m)} \)sigma, mu, varepsilon`). Coletivamente, as propriedades físicas que definem cada célula formam um modelo de propriedade física \(\mathbf{m}\). Em geociências eletromagnéticas, estamos frequentemente interessados no “problema inverso”. Ou seja, podemos recuperar o modelo de propriedade física \(\mathbf{m}\) se \(\mathbf{u}\) e \(\mathbf{q_s}\) são conhecidos?